情報処理学会第82回全国大会にて「車輪に取り付けたBLEビーコンによる車椅子移動認識の基礎検討」というタイトルで発表してきました
報告と感想
3月5日(木)~3/7日(土)の日程で開催された情報処理学会第82回全国大会において研究発表を行ってきましたので、報告させていただきます。
今回の発表では「車輪に取り付けたBLEビーコンによる車椅子移動認識の基礎検討」というタイトルで、BLEビーコンを用いた車椅子の移動認識に関する研究を発表させていただきました。(論文はこちら)
残念ながら今年はコロナウイルス流行の影響で金沢工業大学での発表は中止となり、初のオンラインでの開催となってしまいました。そのため、普段の学会発表と違いZoomを用いた画面越しでの発表となり、少し戸惑うこともありましたがなんとか無事に終えることができました。
ちなみに余談ですが、3000人規模の学会をオンライン上で行うことに関して、あまり前例がないということありYahoo! ニュースさんで紹介されていました。
また発表を行った結果、私の発表が**学生奨励賞**に選ばれました!
学会の場で賞を貰うのはこれが初めてだったのでとても嬉しかったです。
大学のホームページでも学生奨励賞の受賞について紹介されました。
今後、研究活動を続けていくに当たって凄い励みになるなと思いました。
学生奨励賞の賞状
研究背景
私は以前に先行研究としまして、水野と共同で「物体内部に設置したBLEビーコンの電波強度を用いた状態推定手法」の研究を行なっていました。この研究は簡単に説明するとBLEビーコン(Bluetoothの電波を発するビーコン)の電波強度を用いてモノの状態を推定するというもので、低コストで設置・運用が行える点が既存の状態推定手法と比べて優れています。
しかしながらこの研究では「閉まっている」、「開いている」というように2値の変化のみを対象としており、回転動作のような周期的に状態が変化するモノや複数の状態を持つモノは状態推定ができないという問題がありました。 そこで本研究では、複数の状態を持つモノの状態推定を目的とし、その代表例として車椅子を用いることで「BLEビーコンを用いた車椅子の移動認識」を目指しました。
また、最終的な目標として車椅子使用者の運動量推定の推定を行い、それをヘルスケアに応用することも目指しています。
提案手法
BLEビーコンは電波が微弱であるため受信機との距離や方向が変化すると受信電波強度も大きく変化します。
そのためこの動画のように車輪にBLEビーコンを取り付けた状態で車椅子を動すと、周期的に変化する波形が得られます。
本研究ではこの特徴を利用し、この波形を解析することによって車輪の回転を捉え、車椅子の移動を推定します。
状態推定アルゴリズム
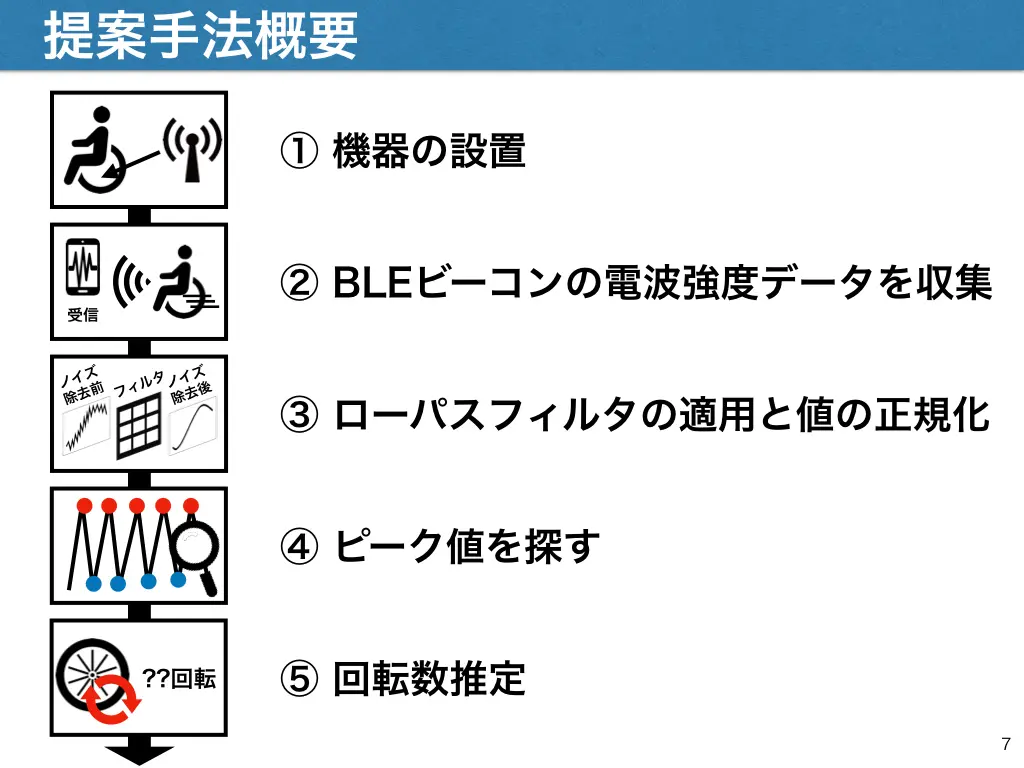
本手法の移動推定アルゴリズムは大まかに分けると次の5つの処理から成っています。
まず最初に移動を推定したい車椅子にBLEビーコンと受信機を設置します。
そして、BLEビーコンの電波強度データを収集し、ノイズを軽減するため取得データに対してローパスフィルタの適用と値の正規化を行います。
次に、ノイズを軽減したデータの中からピーク値を探し、最後にその情報をもとに車輪の回転数を推定します。

まず最初にBLEビーコンと受信機の設置フェーズです。 受信機は車椅子後ろのポケットにBLEビーコンは車椅子の車輪部に設置を行います。 また、BLEビーコンにはパラボラアンテナ型の料理用の計量カップを取り付けており、特定の方向に電波を収束させ、受信機と位置が重なった際に大きな受信電波強度の変化が起きるようにしています。
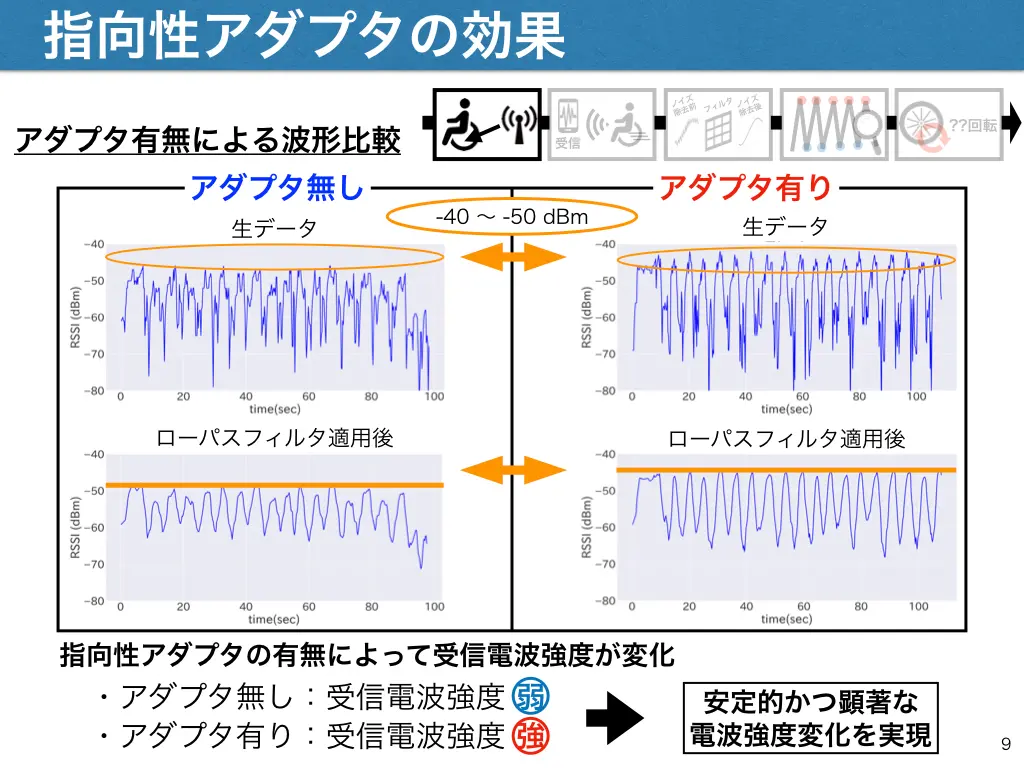
指向性アダプタの効果としまして、取り付けの有無によって受信電波強度に変化が現れます。
左のグラフが指向性アダプタ無しで取った受信電波強度データのグラフで、右のグラフが指向性アダプタ有りで取ったデータのグラフです。
グラフのオレンジ色で囲んだ部分は-40から-50dBmの範囲ですが、指向性アダプタをつけていないグラフと付けているグラフを見比べると、付けている方が受信電波強度が大きくオレンジ枠内にたくさんの波形が入っているのが分かります。
また、下のグラフは生データにローパスフィルタを適用したグラフですが、オレンジ色の直線を引っ張った部分を比べてみると指向性アダプタをつけている方は波形の極大値部分が揃っているのに対し、指向性アダプタをつけていない方はバラついています。
このことから指向性アダプタを取り付けることで、安定的でより顕著な電波強度変化を得ることができると分かります。

次にBLEビーコンの電波を受信するフェーズです。
受信機は車椅子後ろのポケットの部分に、BLEビーコンは車輪部分に設置を行います。
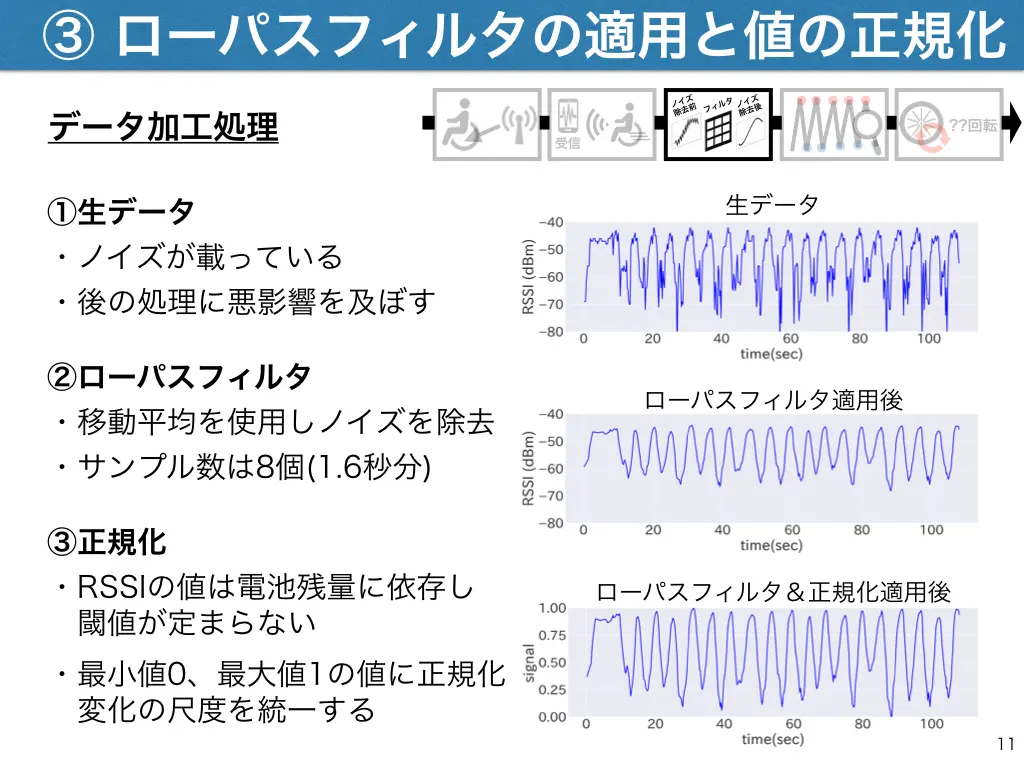
取得した生データにはノイズが載っているため、そのまま使用すると後の処理に悪影響を及ぼしてしまいます。
そこでこのフェーズでは取得したデータの加工を行います。
まず最初にスパイクノイズや細かいノイズを取り除くため、移動平均を用いたローパスフィルタを適用し、波形を滑らかにします。
ここでローパスフィルタに使用するサンプル数は8個(時間にすると1.6秒分)としています。
また、BLEビーコンは電池で駆動しているため、電池残量が減少すると送信電波の出力が弱まり受信電波強度も小さくなります。 これにより後の処理の閾値が定まらなくなってしまい、結果として移動推定の精度に影響を及ぼします。そこで次の処理として、ノイズを軽減したデータに対し0~1の間の値になるよう正規化を行い変化の尺度の統一を行います.
次にピーク値を探すフェーズです。
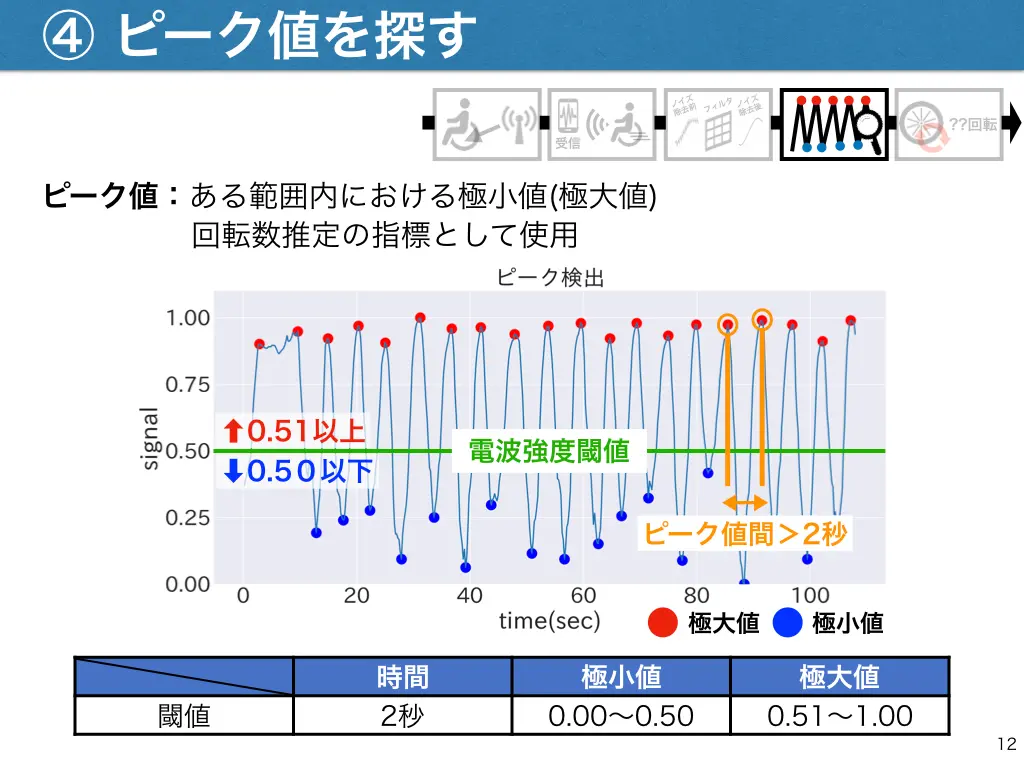
ピーク値とはある範囲内における極大値(極小値)のことで、本研究では回転数推定の指標として使用します。
グラフでは赤で示した点が極大値を、青で示した点が極小値を示しています。
車輪の回転状態やBLEビーコンの電波状態によっては、ローパスフィルタで除去しきれない電波強度の揺らぎが発生し、ピーク値の判定を誤る場合があるので、ピーク値同士の時間間隔とそれぞれの信号強度に閾値を設けて誤検出の抑制を行います。
今回は時間の閾値として2秒、信号強度の極小閾値として0.00〜0.50、極大閾値として0.51〜1.00と設定しています。
最後に回転数を推定するフェーズです。
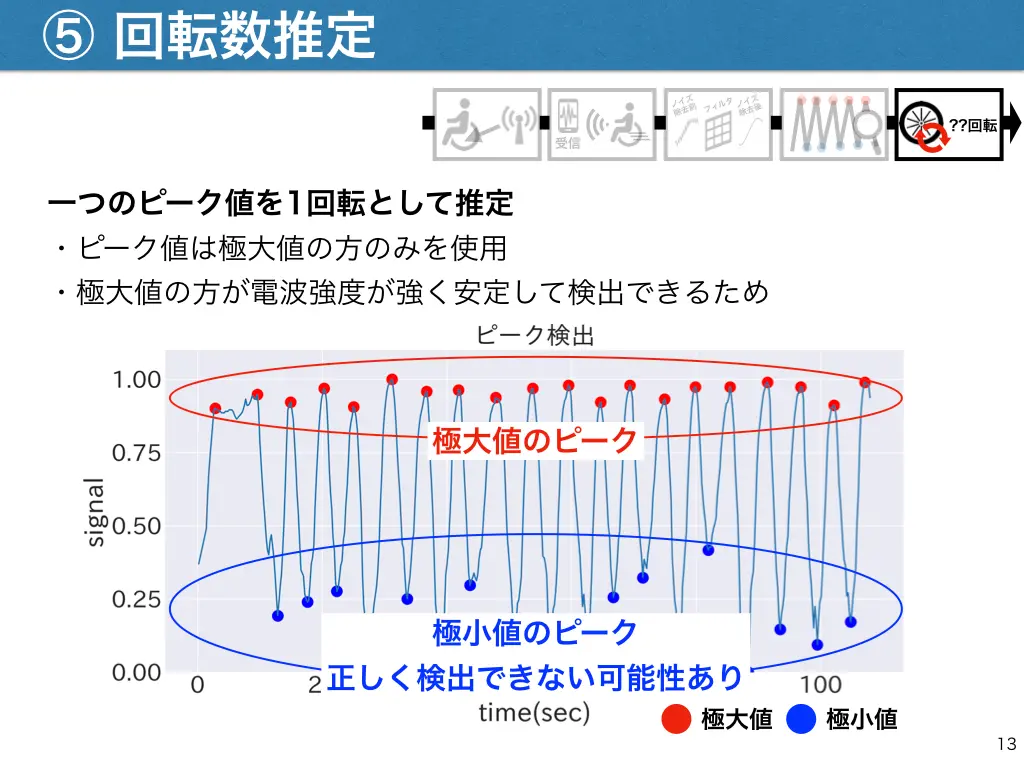
回転数は前のフェーズで見つけたピーク値の個数を指標にします。
ここで移動推定には赤色で示した極大値のピーク個数と、青色で示した極小値のピーク個数を使う方法が考えられますが、極小値のピーク値は電波強度が弱く正しく検出できない場合があります。
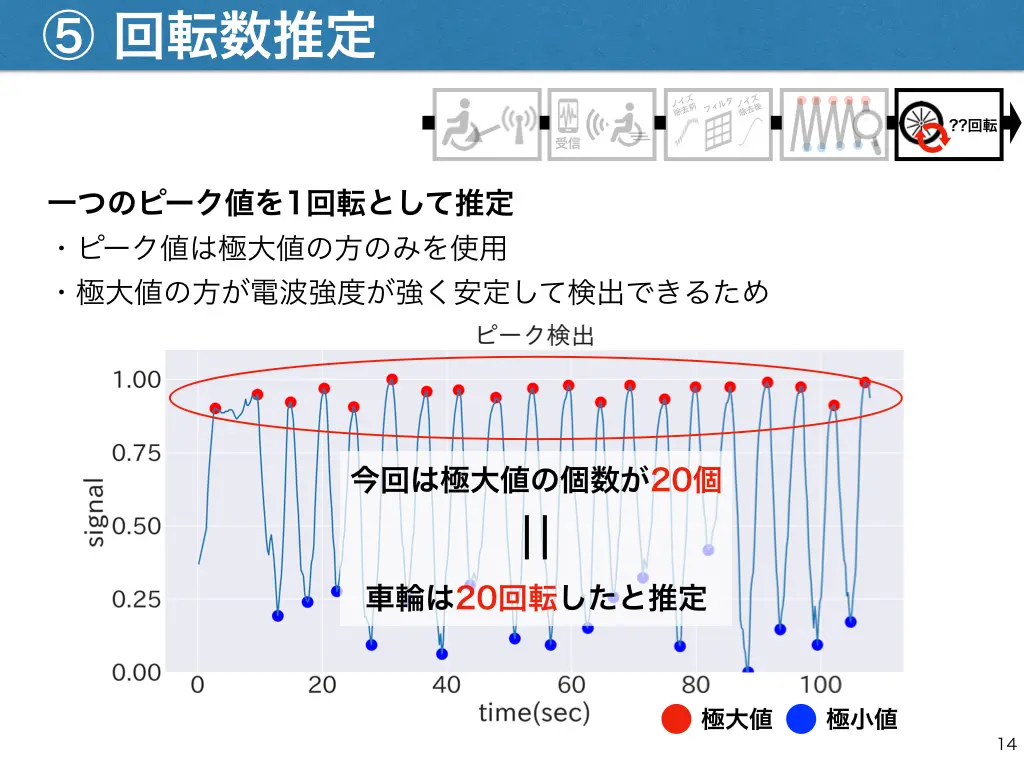
そこで本手法では極大値のピーク個数のみを移動推定の指標として使用します。
このグラフでは極大値のピーク値が20個あったので車輪は20回転したと推定します。
評価実験
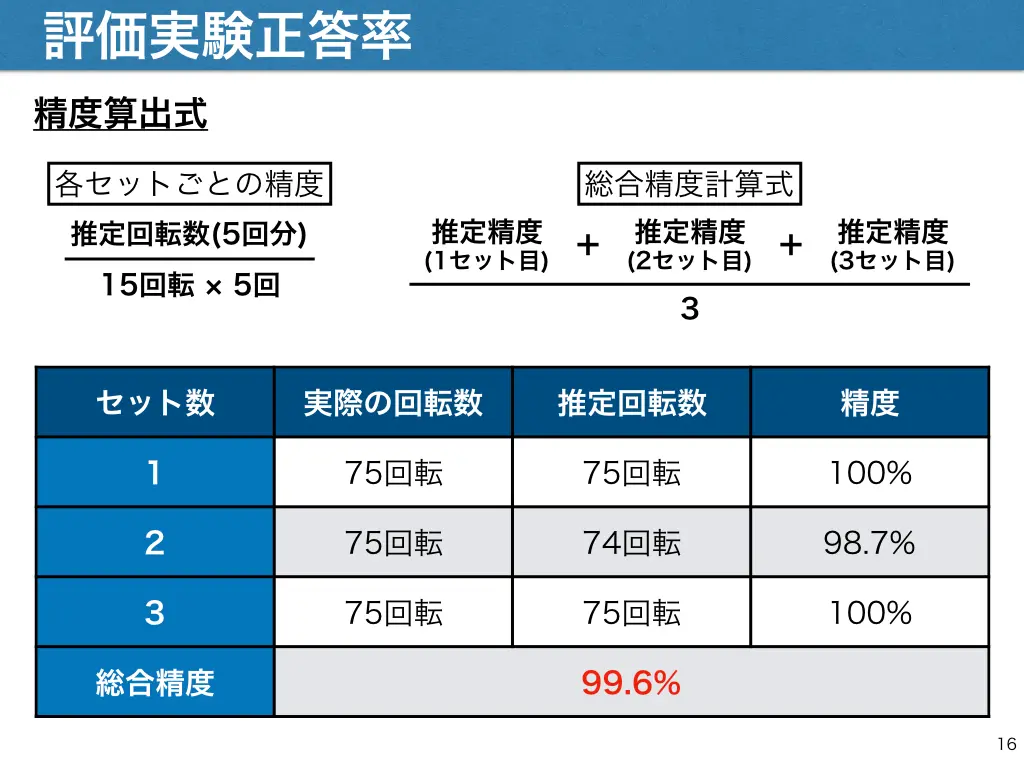
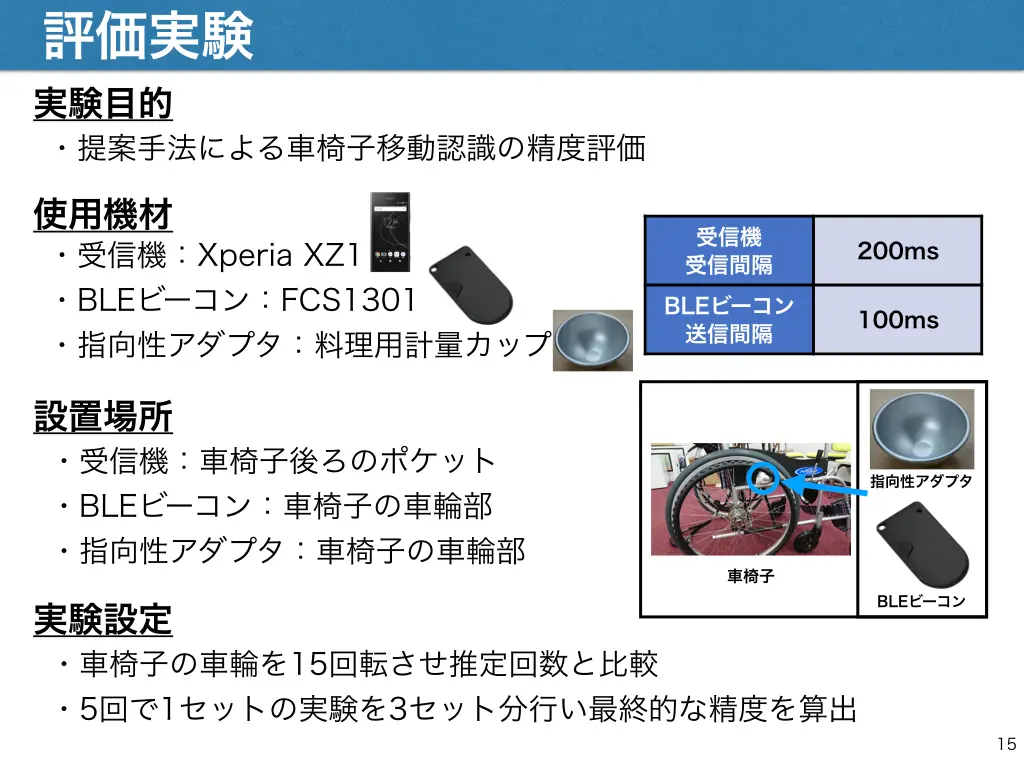
提案手法の推定精度を確認するため評価実験を行いました。
使用機材として受信機はXperia XZ1をBLEビーコンはforcus system社製のFCS1301を使用し、受信機の受信間隔は200ms、BLEビーコンの送信間隔は100msと設定しています。
また、機器の設置はそれぞれ写真に示す位置に設置しました。 実験設定として、車椅子をあらかじめ決めておいた数だけ車輪が回るよう動かし、実際の回転数と推定回転数をもとに正解率を出すことで評価することとしました。
評価実験の結果、セットごとの正解率は、1セット目が100%、2セット目が98.7%、3セット目が100%ととなり、総合的な推定精度は99.6%となりました。 この結果から本手法の有効性を確認することができたと考えられます。